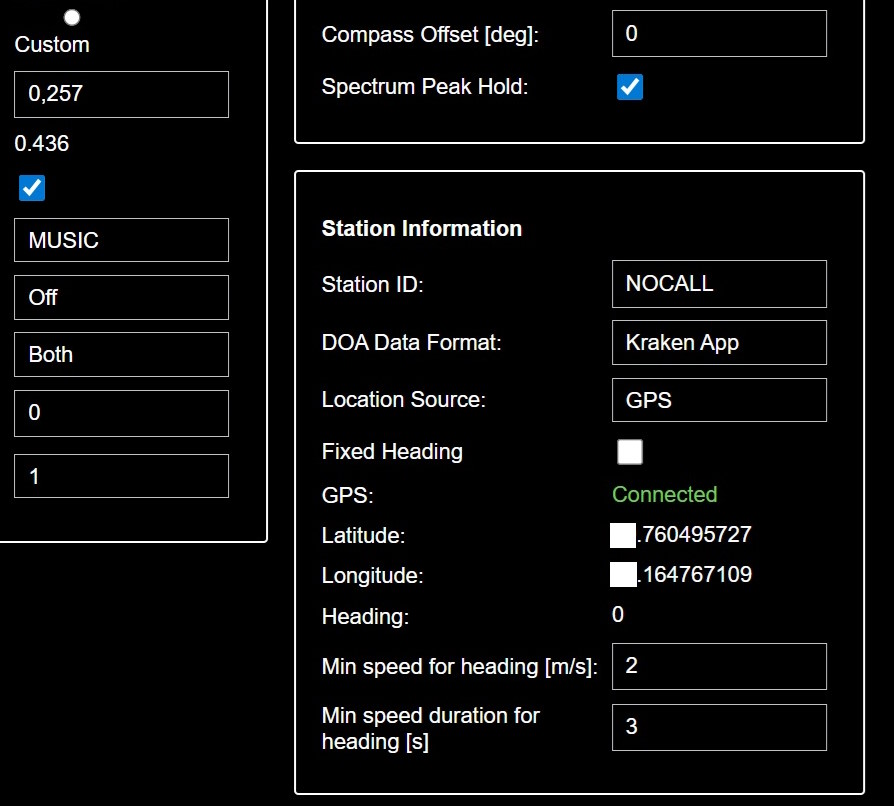
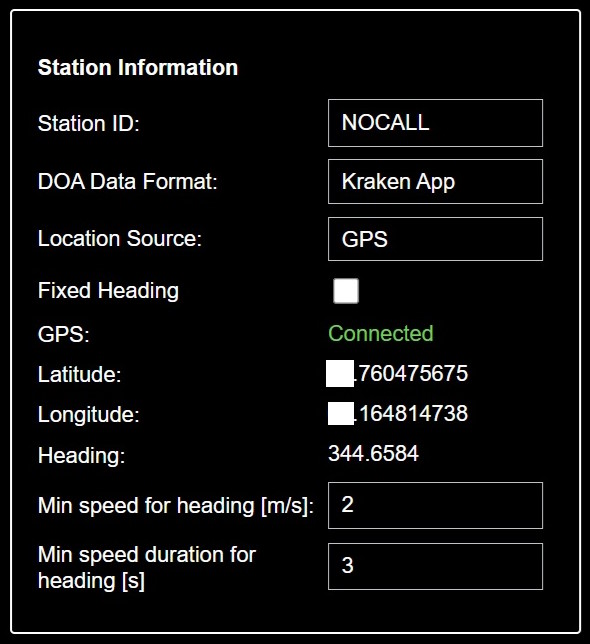
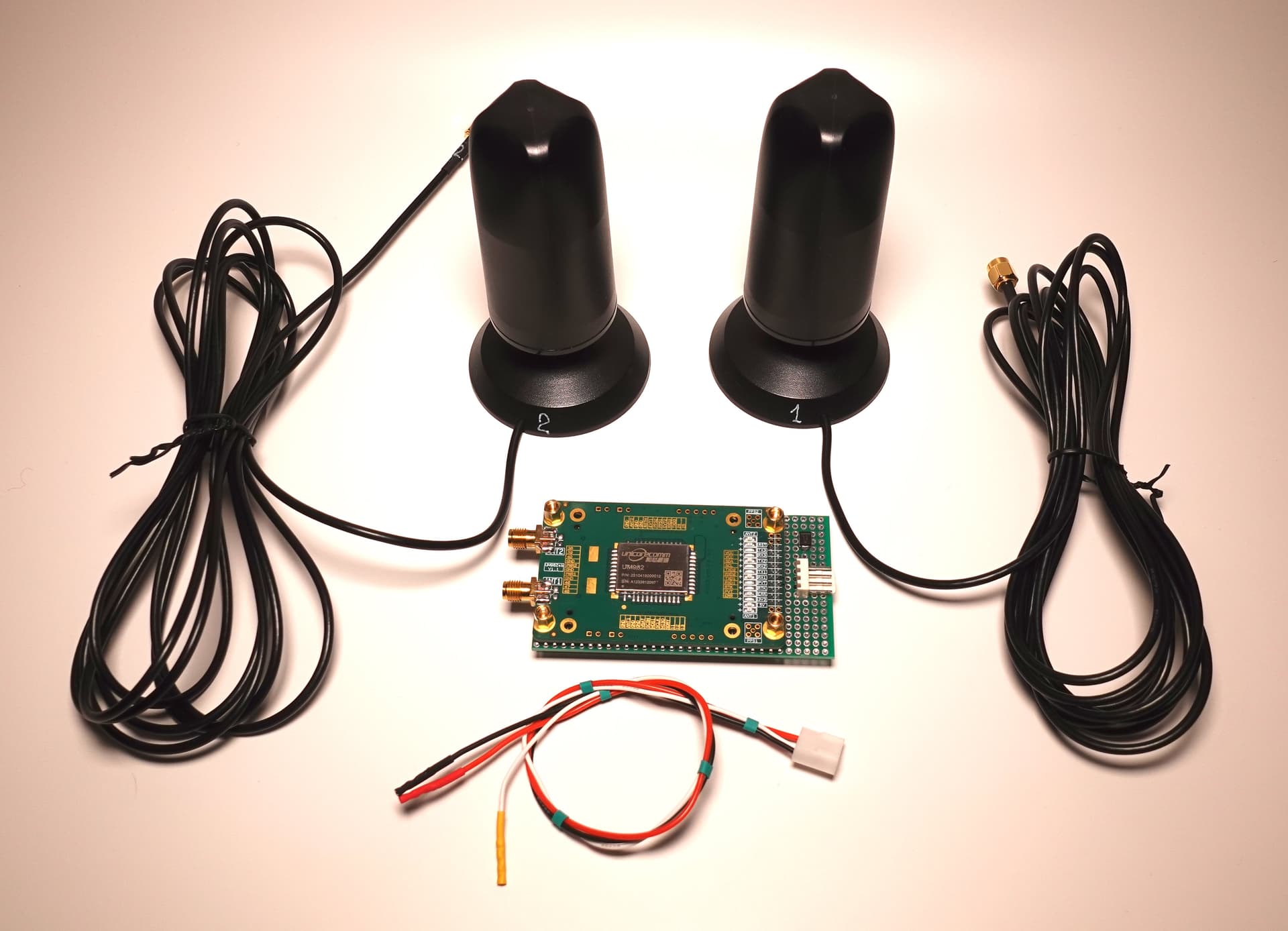
I’m the “USA Beta Tester” for the DATHFK, and I am thrilled to report that it works. What it does is use two GPS antennas; one determines the vehicle’s location, and the other determines the heading or direction the vehicle is pointing. While the Kraken app does an excellent job of this when the vehicle is moving, after you come to a stop, it loses its bearings, and either starts randomly jumping around, or it defaults to pointing north. Because the Kraken app plots the bearing on the map in relation to the direction it thinks the array is pointing, any errors in the array direction lead to corresponding errors in where the app plots the signal as being.
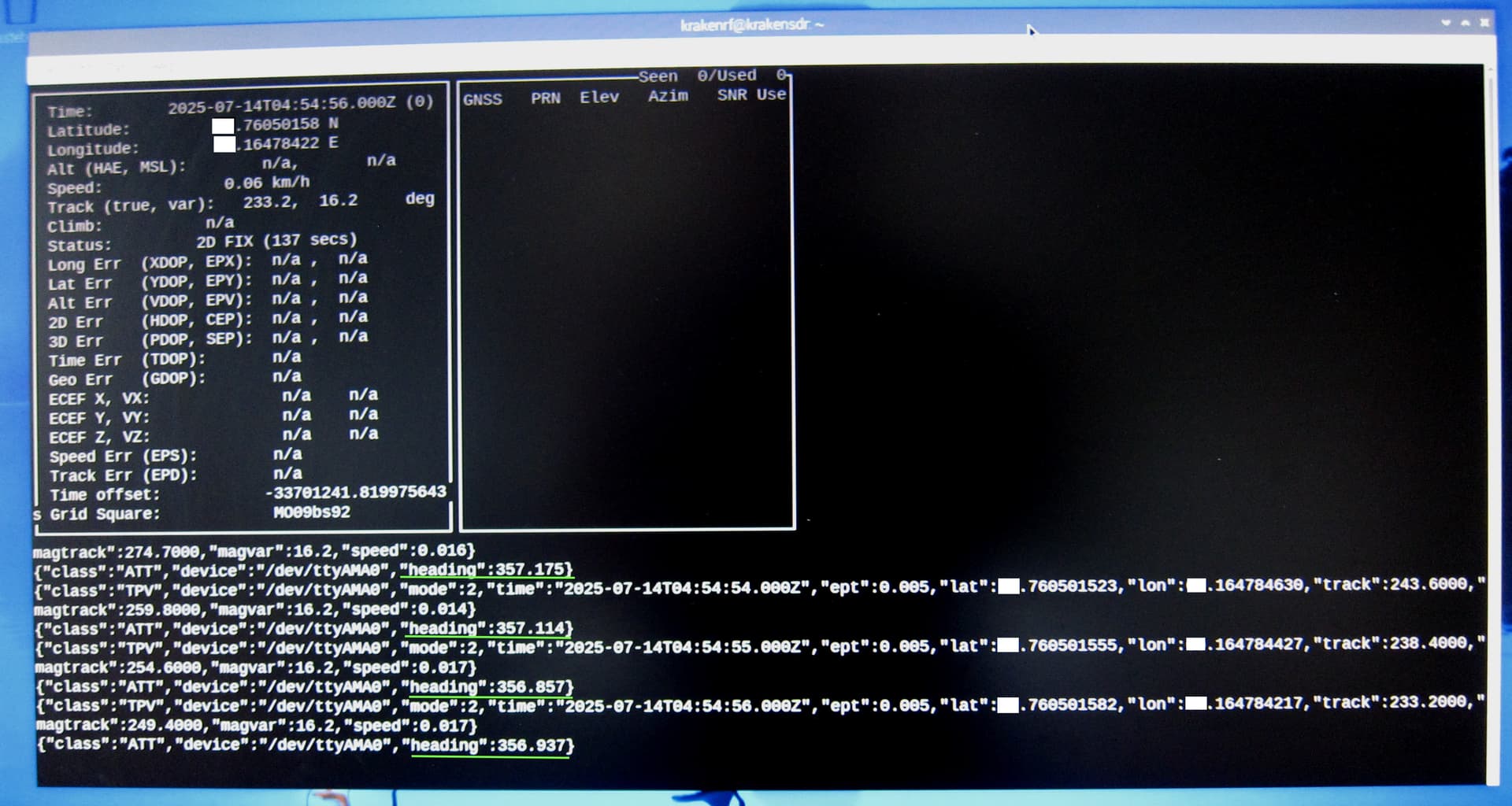
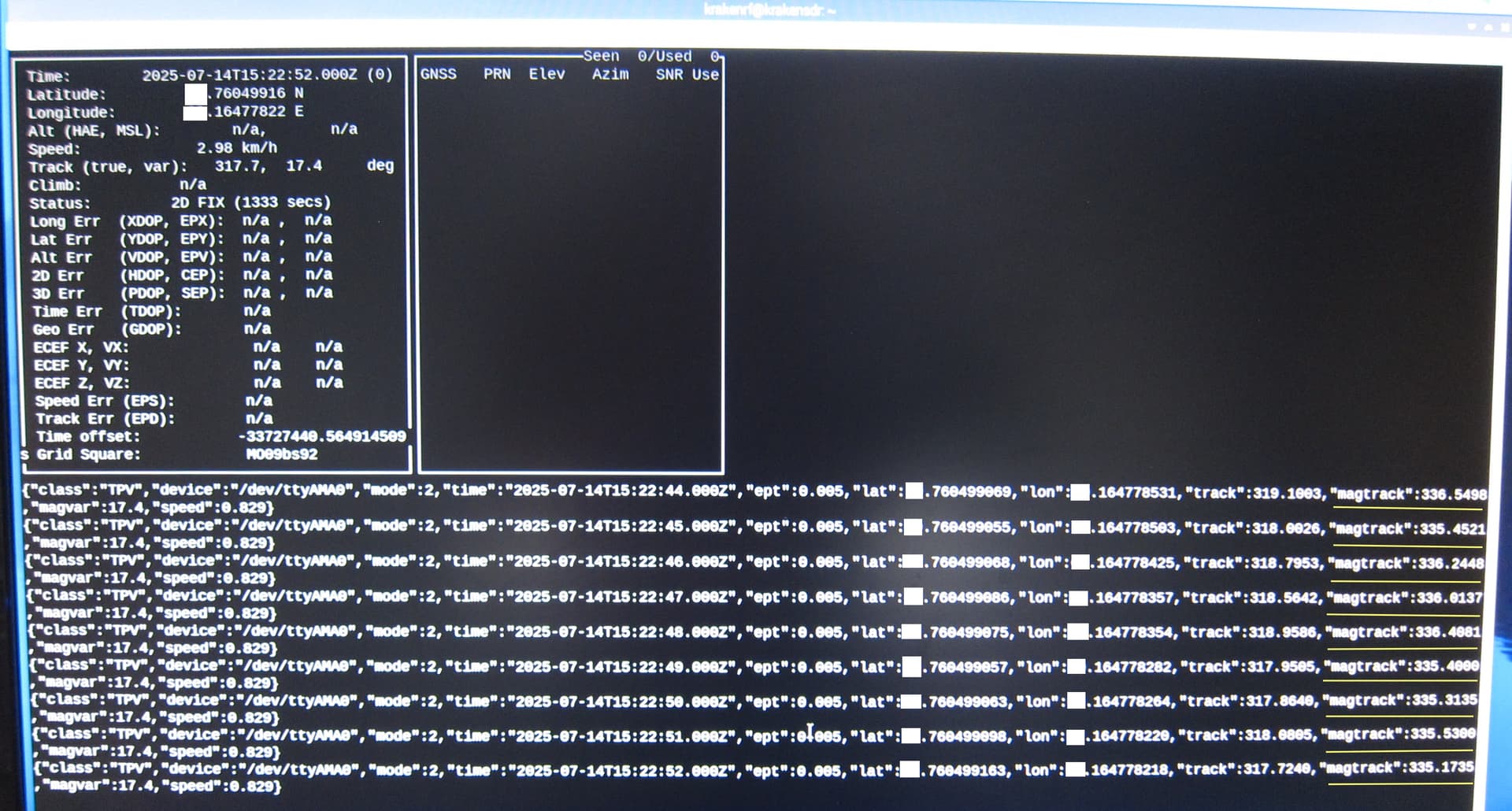
The DATHFK solves this problem, and gives you an extremely accurate (1/10th degree) heading all the time, moving or stationary. I leave my Kraken running in my vehicle from 8am to 8pm, even while I’m at work. When stationary, the direction/heading data is rock solid.
I’m hunting a person who is mobile, with a low powered transmitter, and who is active at random times from very different locations. I drive around, stop, and monitor over and over again. Before having this, every time I parked my truck, I would have to get out my phone and a map program to get my Lat/Lon coordinates, and then get out of the truck to take a compass bearing for the direction it was facing, and then enter these readings into the Kraken app. For places I went on a regular basis, I kept notes, so I didn’t have to take new readings every time, but this meant that every stop required several minutes of time setting up the Kraken, and I often made 5-10 stops in a day.
I’ve been using it 6-10 hours a week for the past two weeks, and 3-5 hours a week for the two weeks prior to that. It pretty much worked right out of the box so to speak.
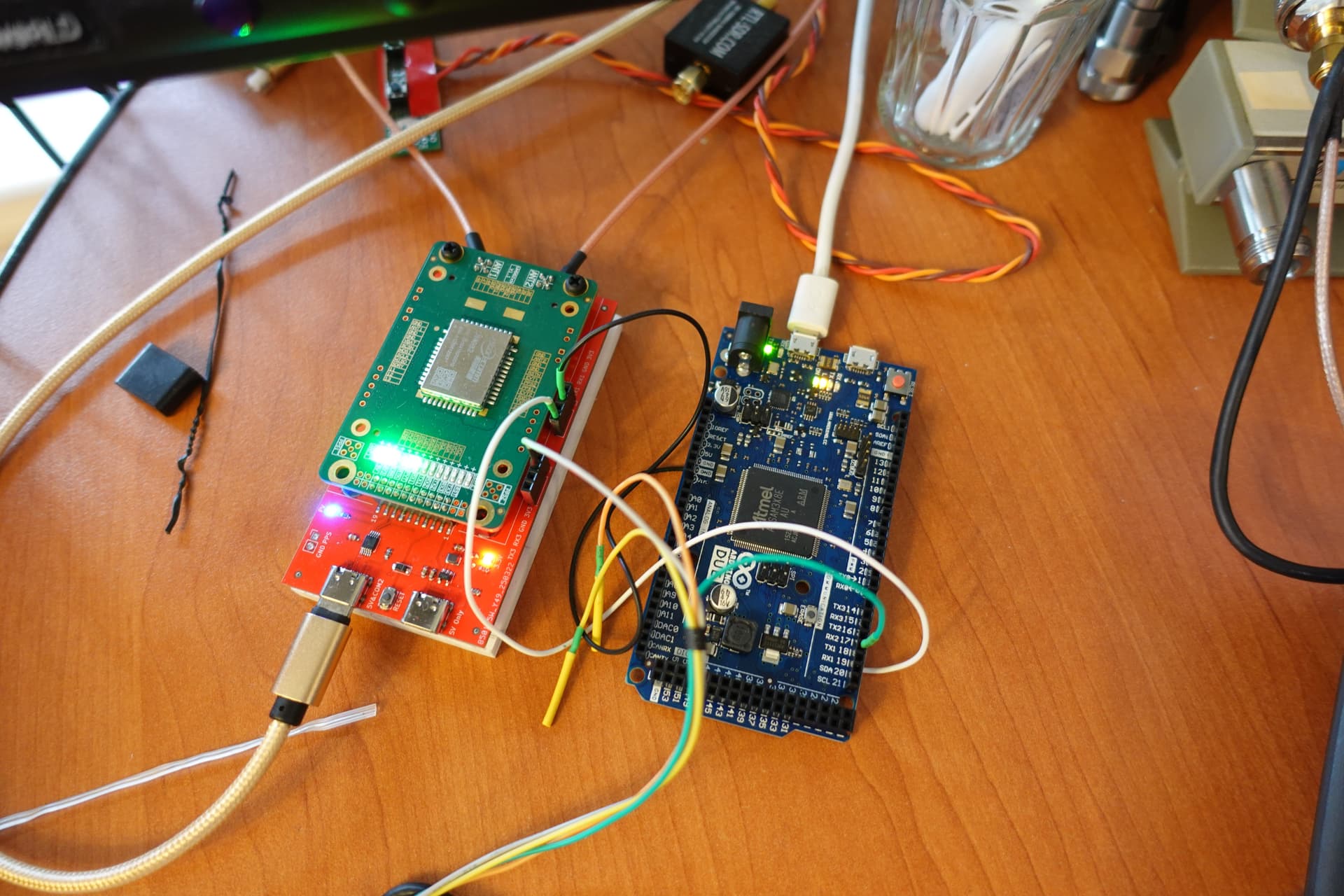
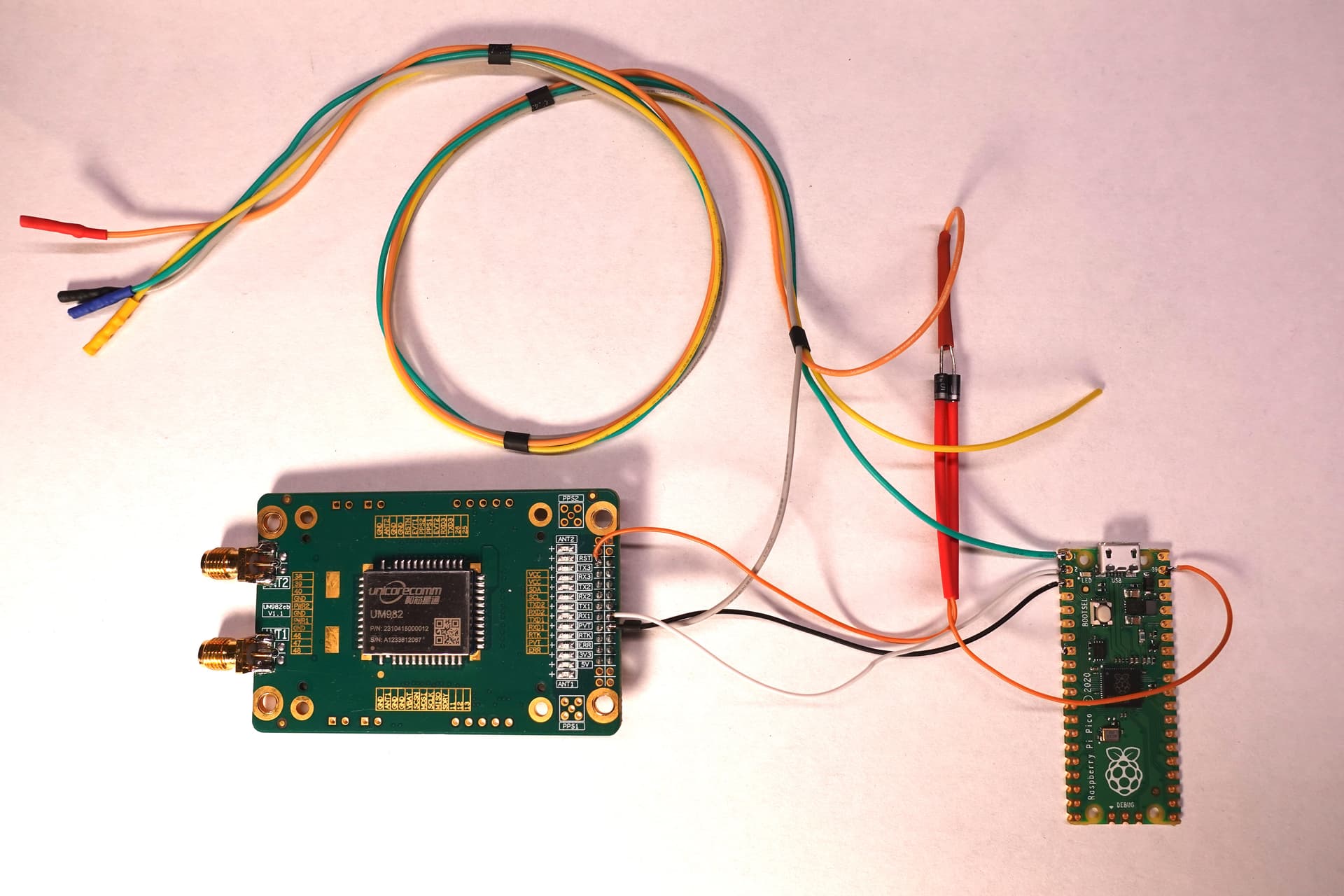
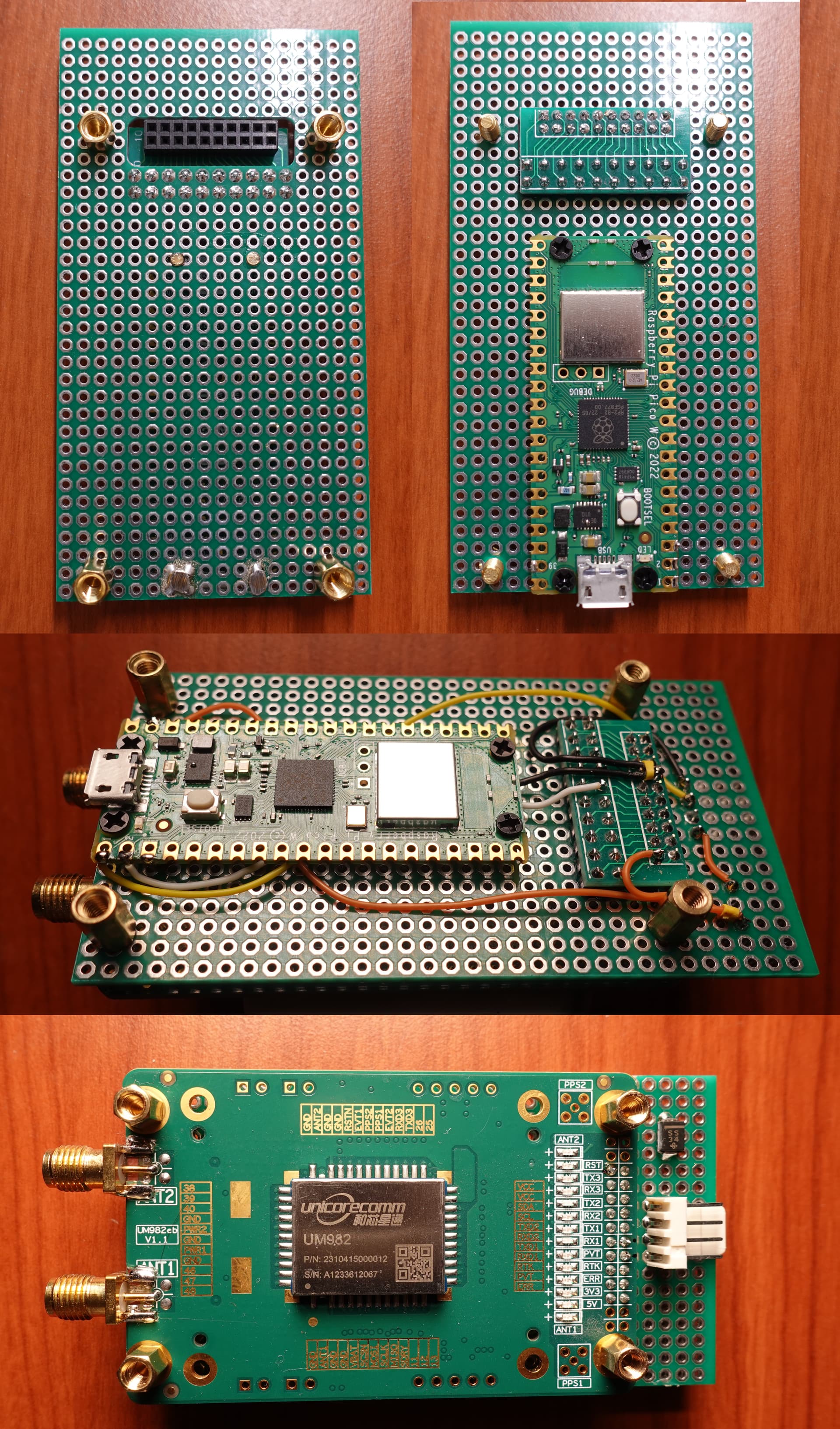
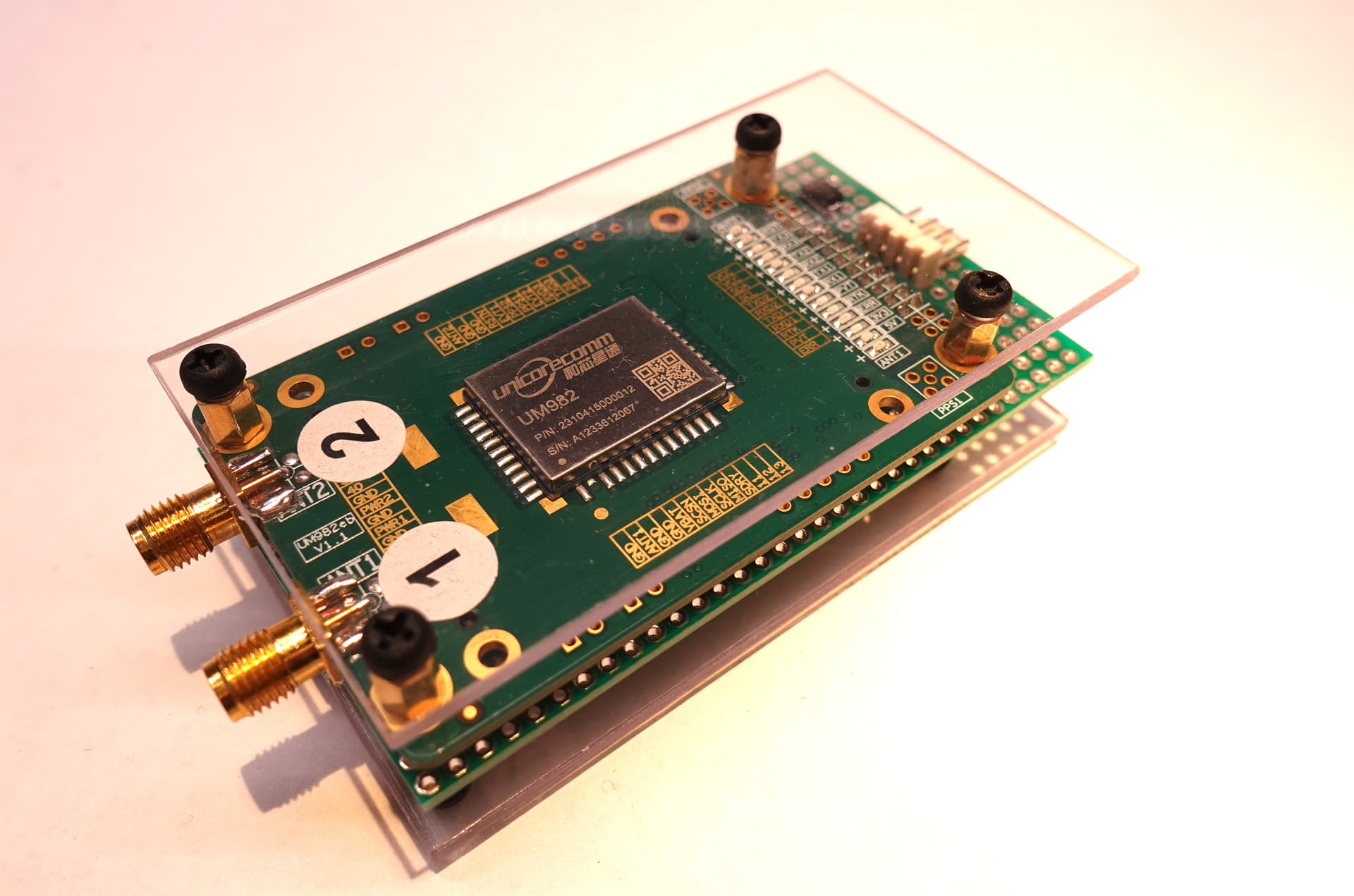
I had to solder header pins onto the circuit boards and crimp some cables to connect the devices, program the Pi Pico and UM982 GPS Module, burn the custom RPi5 image on a SD card, and assemble the PCBs into an enclosure. I beat my head against a wall for almost a week trying to get the device to get a GPS fix before realizing that I’d totally forgotten to program the UM982!
You will need a Windows PC to program the UM982, but not for direction finding.
There is one bug that still needs to be worked out. On the Kraken app map, there are several pieces of information that are shown: First is one’s location, second is the DOA lobes, third is the bearing lines to the transmitter if you have it set to plot the log file, and fourth are the various direction and heading lines.
The bug is that if the Kraken is not detecting any signals above the squelch threshold, only your location point updates on the map, and the DOA lobes, bearing lines and log file plots stay at the last place it detected a signal at. So, you can drive 5 miles, and it will look like you haven’t moved.
My solution to this is to quickly key up my hand held radio; as soon as the Kraken sees the signal, it updates all the data to the new location.
I have parts on order to build two more setups for my partners, and I’ll post updates when I get them working.