Hello Team
I have spent hours reading this forum. A massive thanks to all the replies.
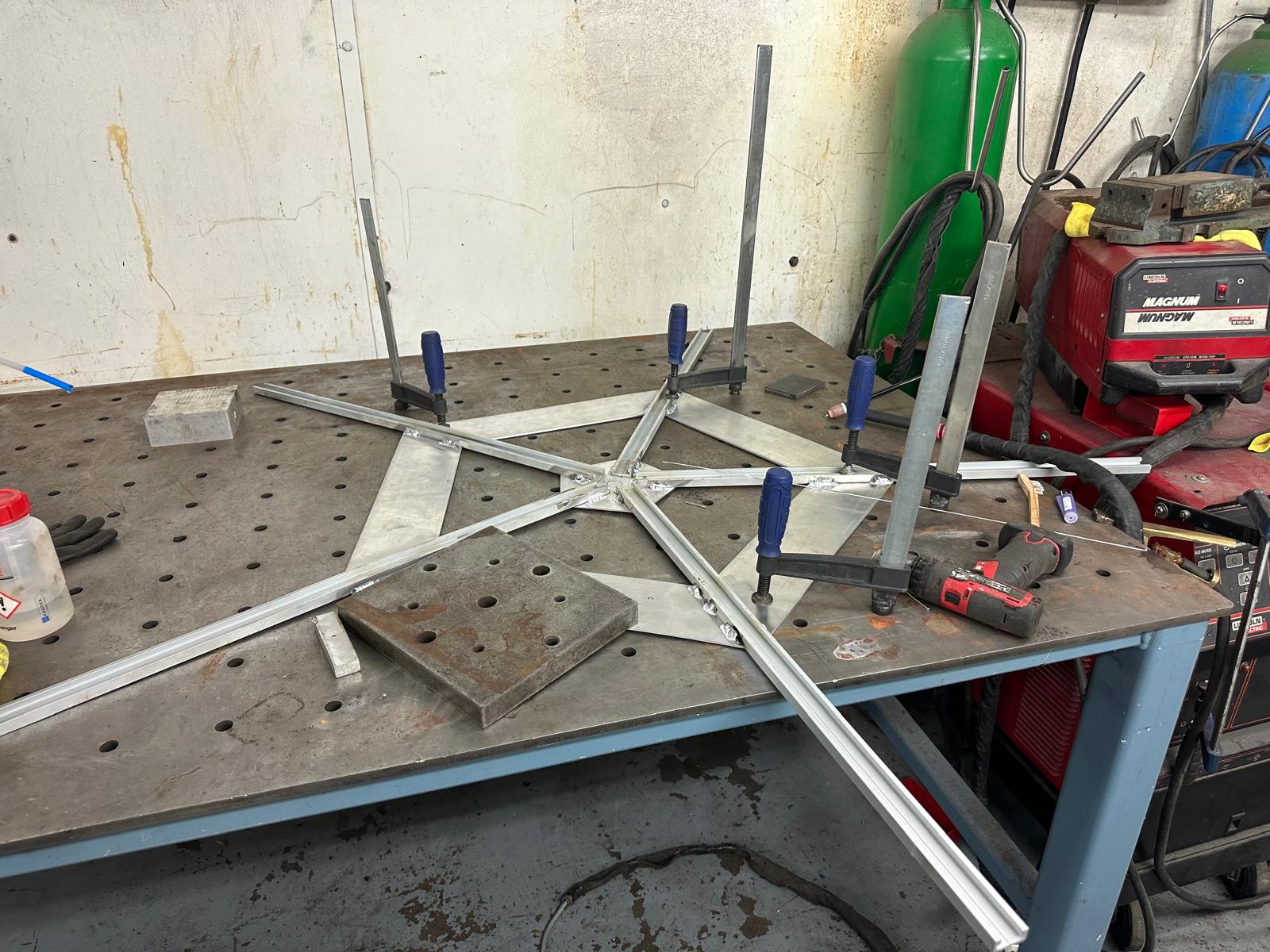
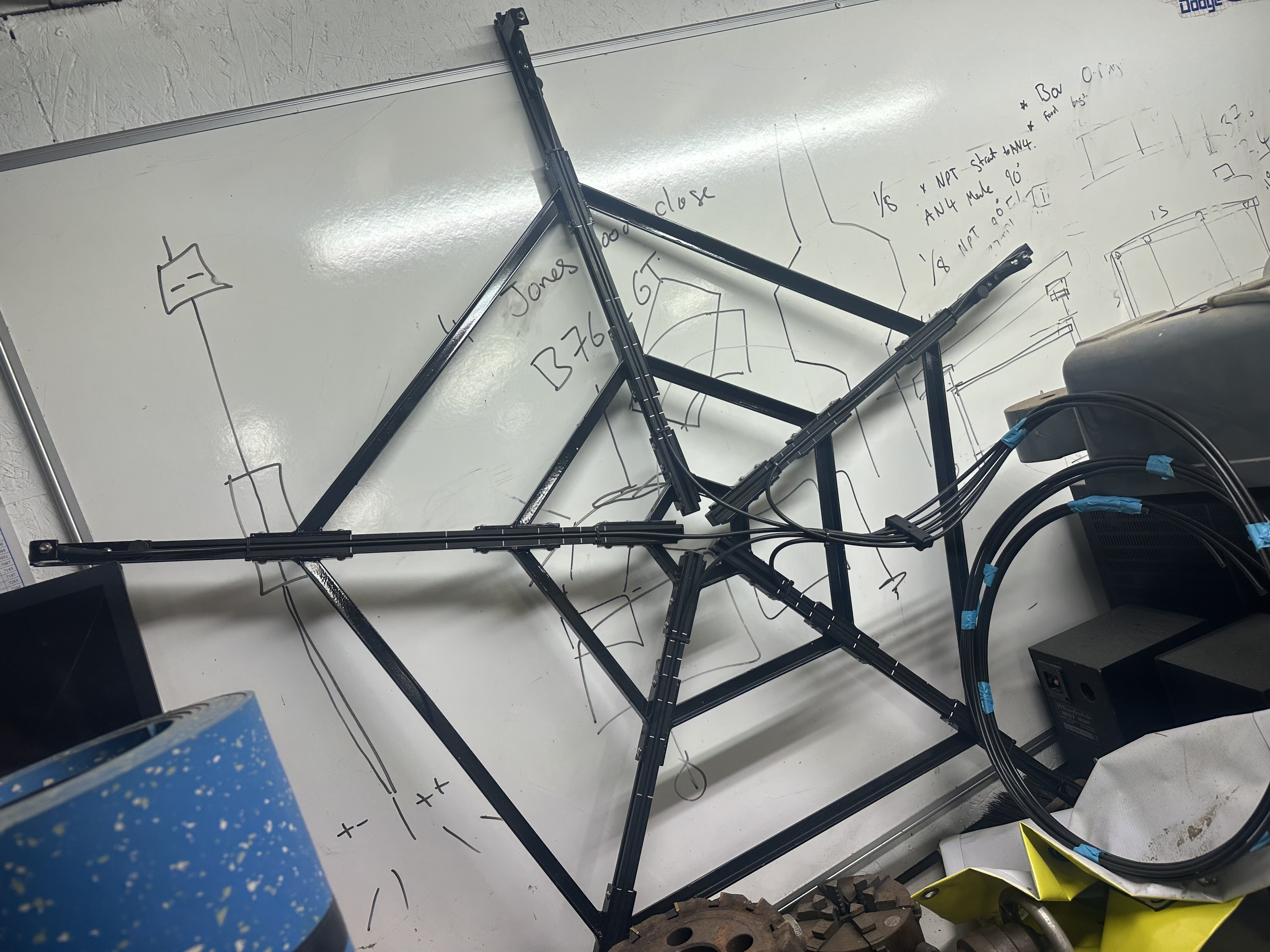
I currently making a Pickup truck mount to mount the antenna onto the roof for a permanent installation.
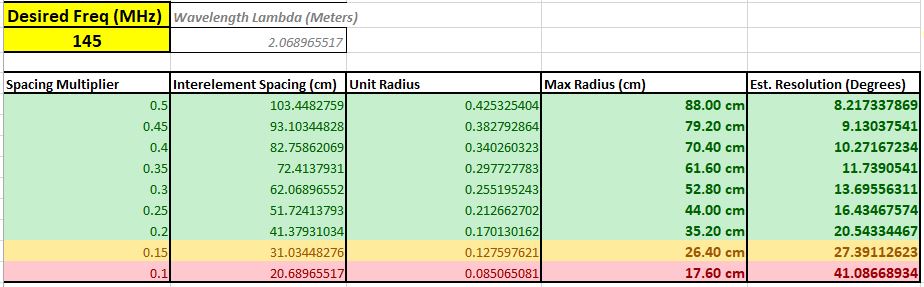
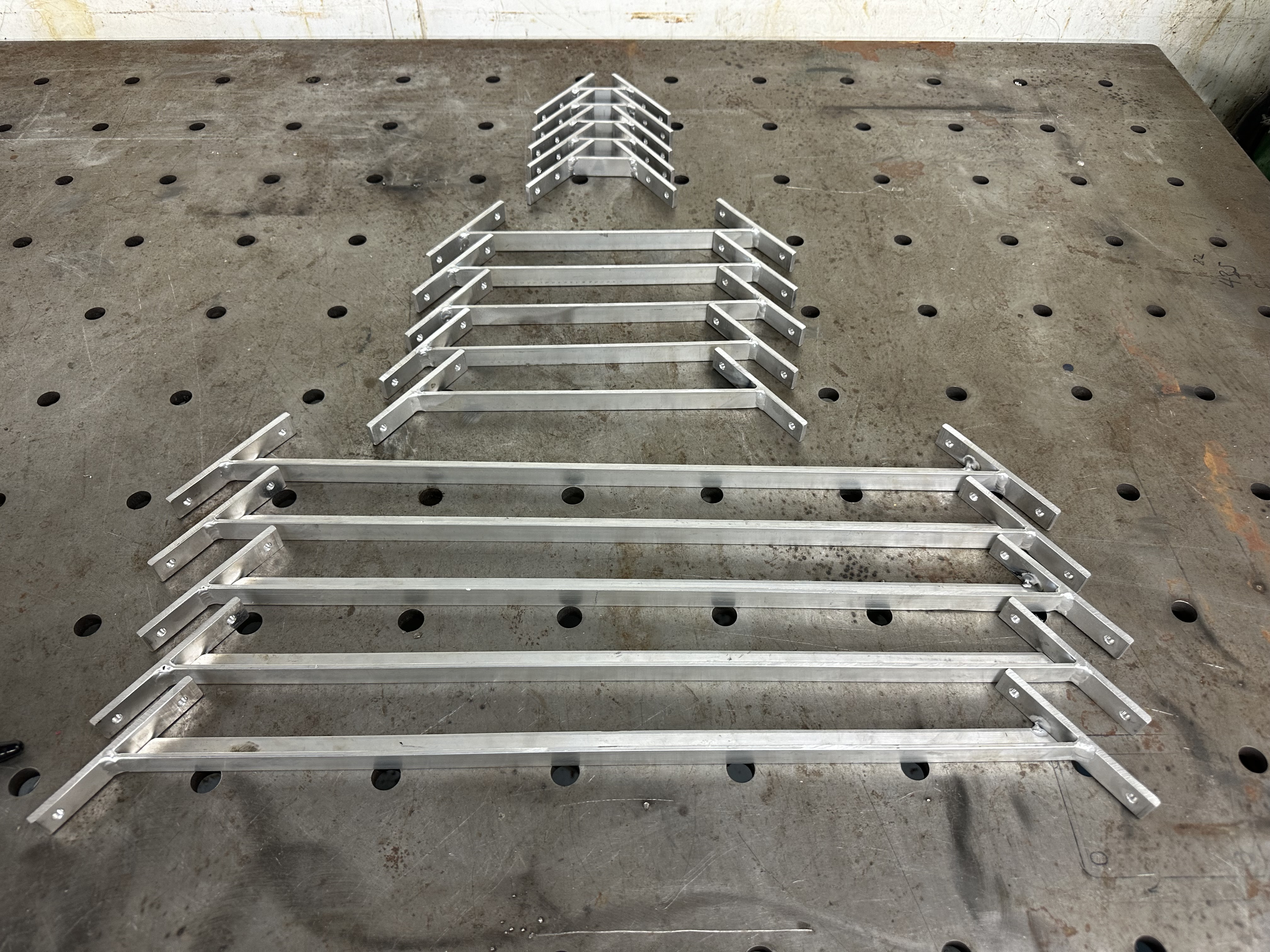
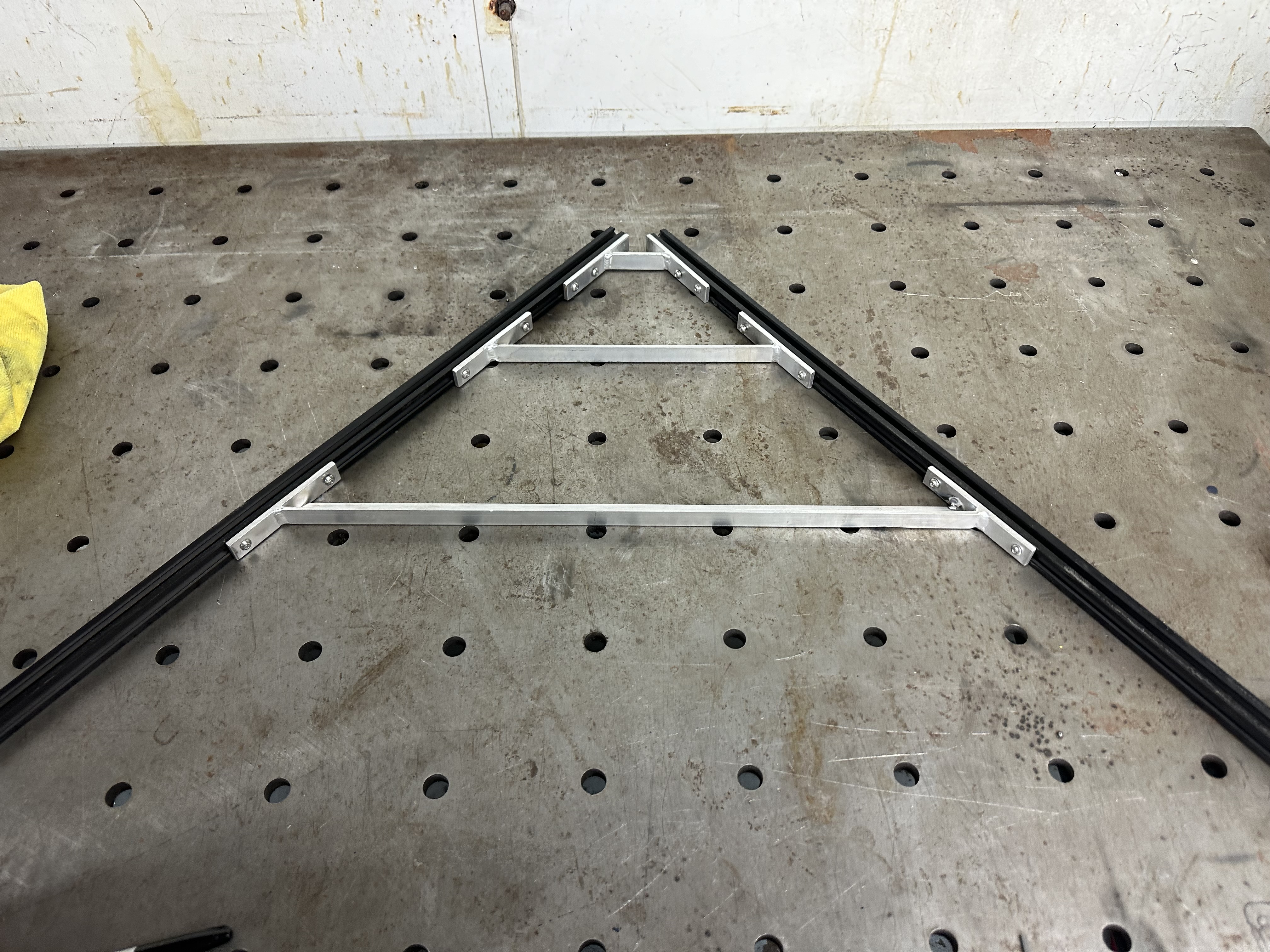
I made this system adjustable so I could work on different frequencies in reality; this will be mainly used at 145Mhz and 433Mhz, and maybe I can use it at a higher frequency to help someone out.
At 145mhz, we have a radius requirement of 88cm BIG!
Going to a lower radius results in a lower resolution = lowering Degrees of certainty
In real-world driving around, my question is, what effects does having a compromised resolution have?
The roof of my truck is aluminum…. Hence, I want to get this installed once and correctly.
There must be lots of people using this at 144mhz, so I am keen to understand what testing people have done and what spacing is being used.
Using the Mag Mount antennas on my car (2014Taurus) I found that as you get closer to the target, the resolution area gets narrower. Example, a resolution of 5 degrees is large when the target is 10 miles away. But as you get closer, that same 5 degrees gets smaller/narrower. (did that make sense?)
My experience is that a vehicle mounted KrakenSDR works better than the KrakenRF team gives themselves credit for, at least @ 146.565MHz. I use the mag mount antennas with 40cm inter-antenna spacing on the roof of my car,it has always worked fine. Its worked when I had the array slightly off-axis, it worked when I had the array a lopsided by ~1cm, it works when my antennas are off the vertical access due to the dome shape of my roof. The only time the KrakenSDR didn’t work is when I connected the antennas in the reverse order (doh!).
When you are mobile, and the phone app is integrating multiple data points from multiple physical locations, it is the quantity, geographic spread, and the closeness to the target of those samples that matters, not the precision of each individual sample. Remember, you are driving a truck, not a helicopter. All you need to know is which way to turn at a road junction to get physically closer. “North-ish” is just as useful as "010 degrees " or “352.1 degrees”. The Kraken phone app will integrate all the data on a map, and will constantly update the estimated signal source as you get closer. With my setup I usually get a fix that is within 25 feet of the signal source.
In general you’ll get usable results down to a spacing multiplier of 0.2, and often even less is OK. It might just take a little longer to get an accurate location, because when the resolution is poorer, things like multipath can make it more difficult to get an accurate bearing. But as long as you’re continually gathering more data by driving it will all average out.
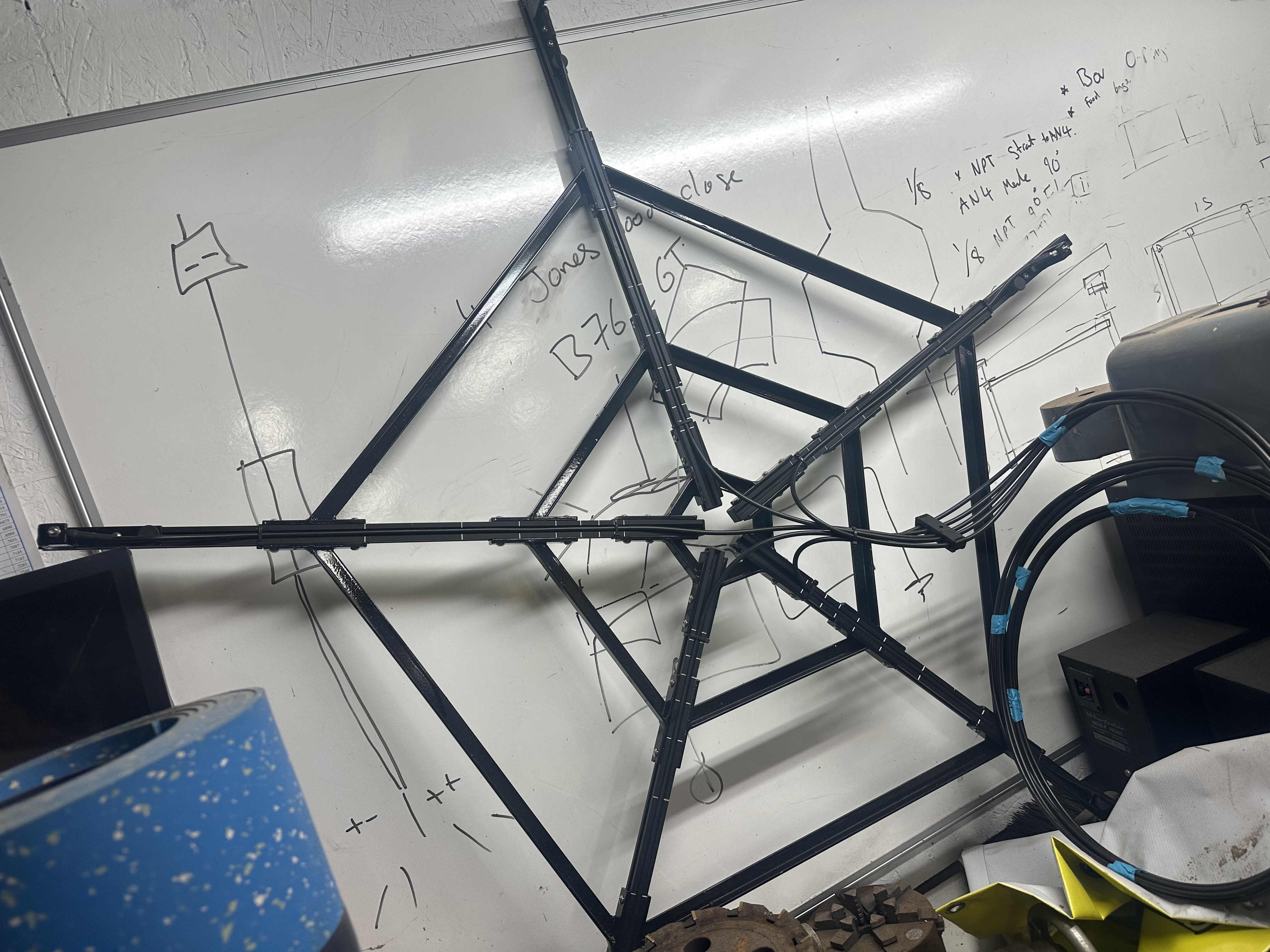
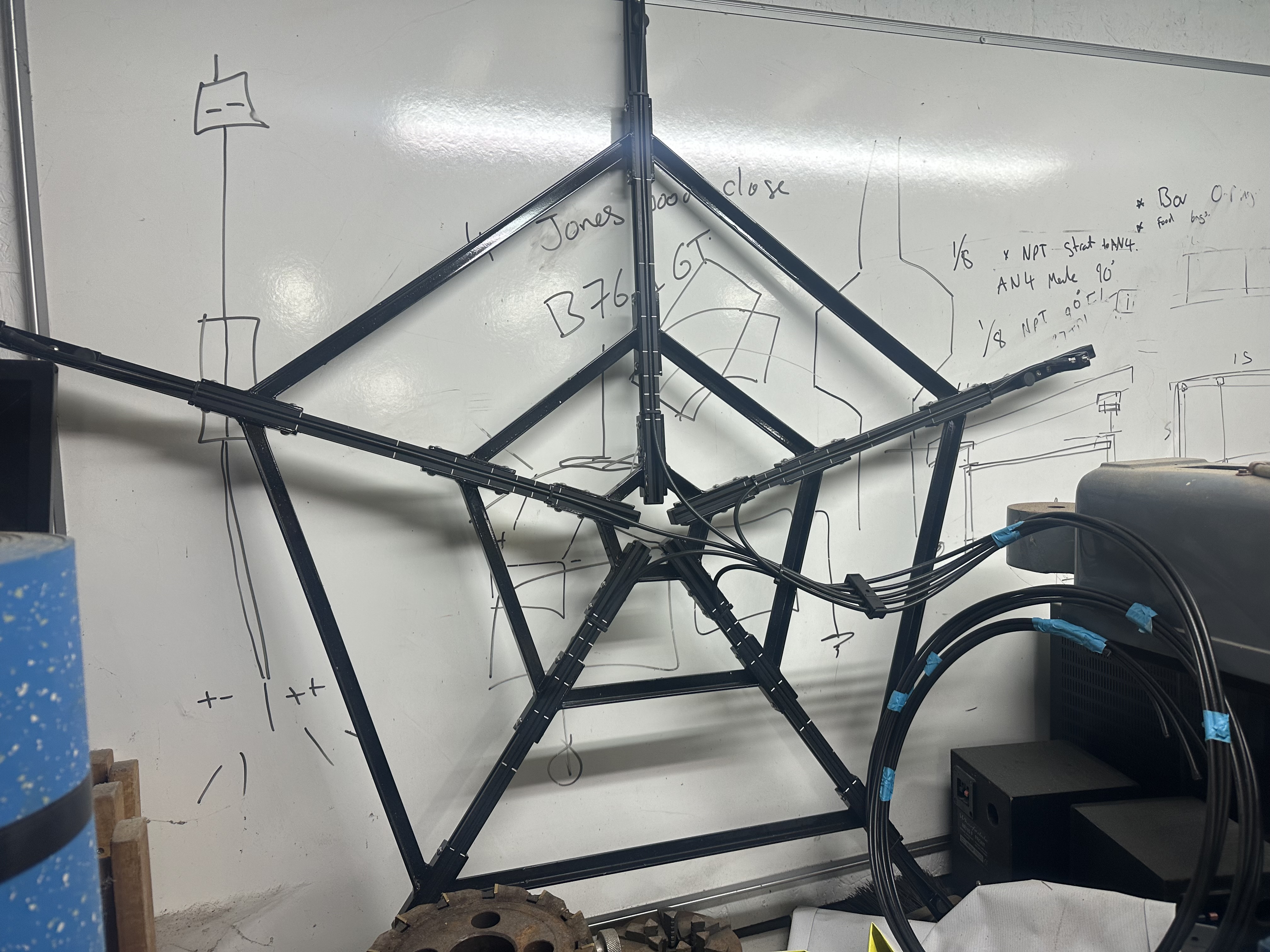
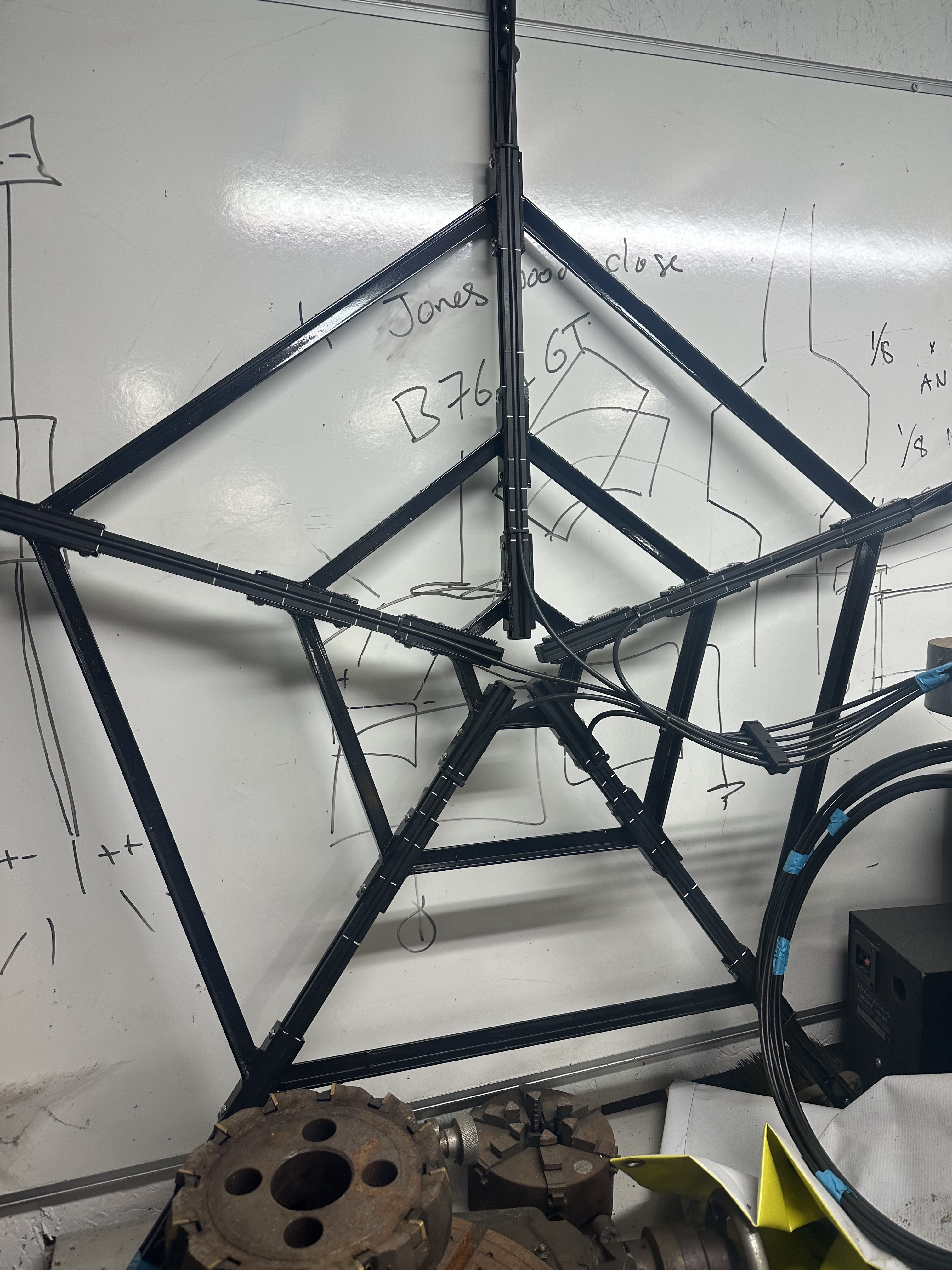
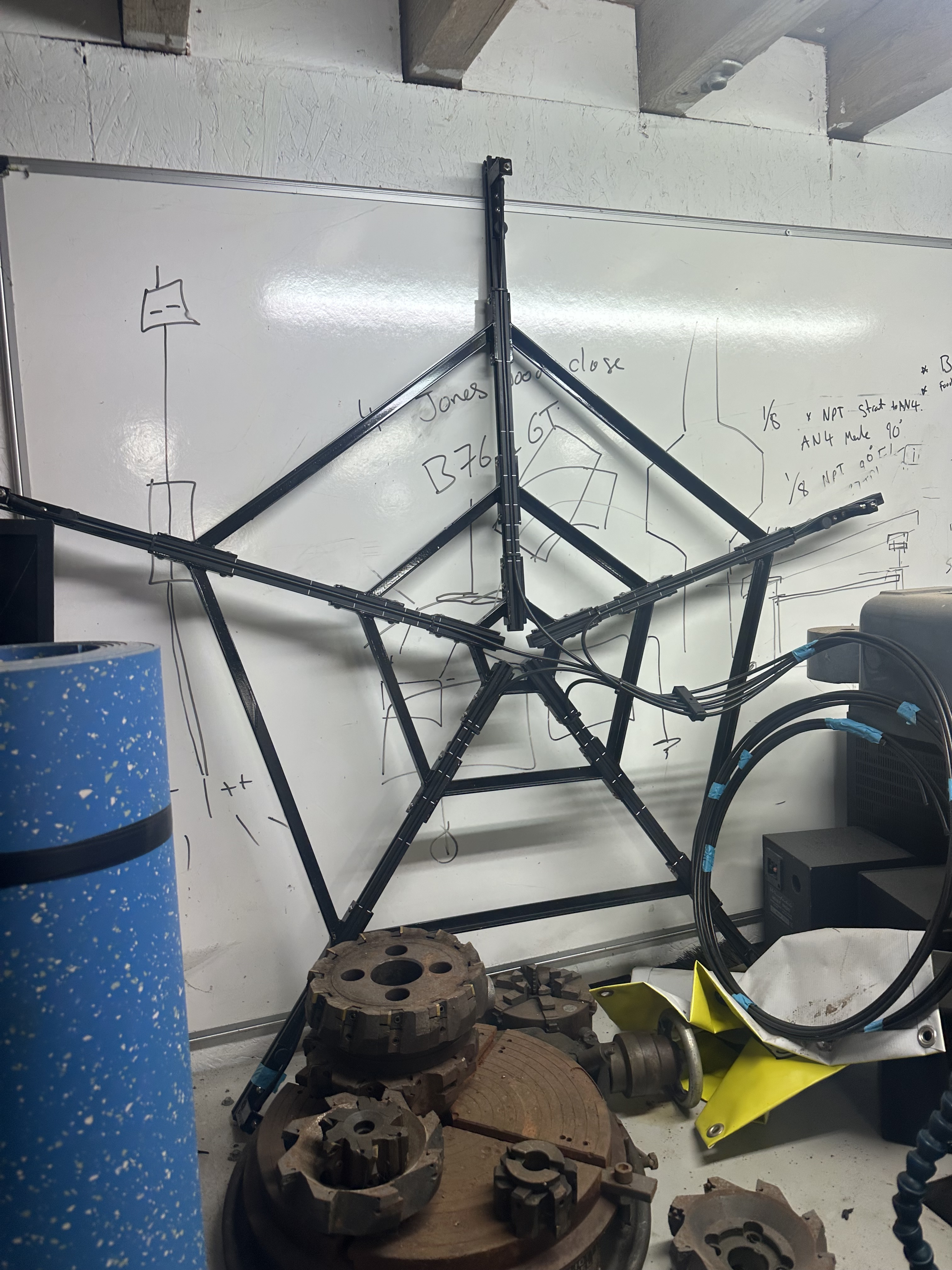
I ended up using the Arrow array and modifying it for car mounting with the center hole attaching to my NMO mount.
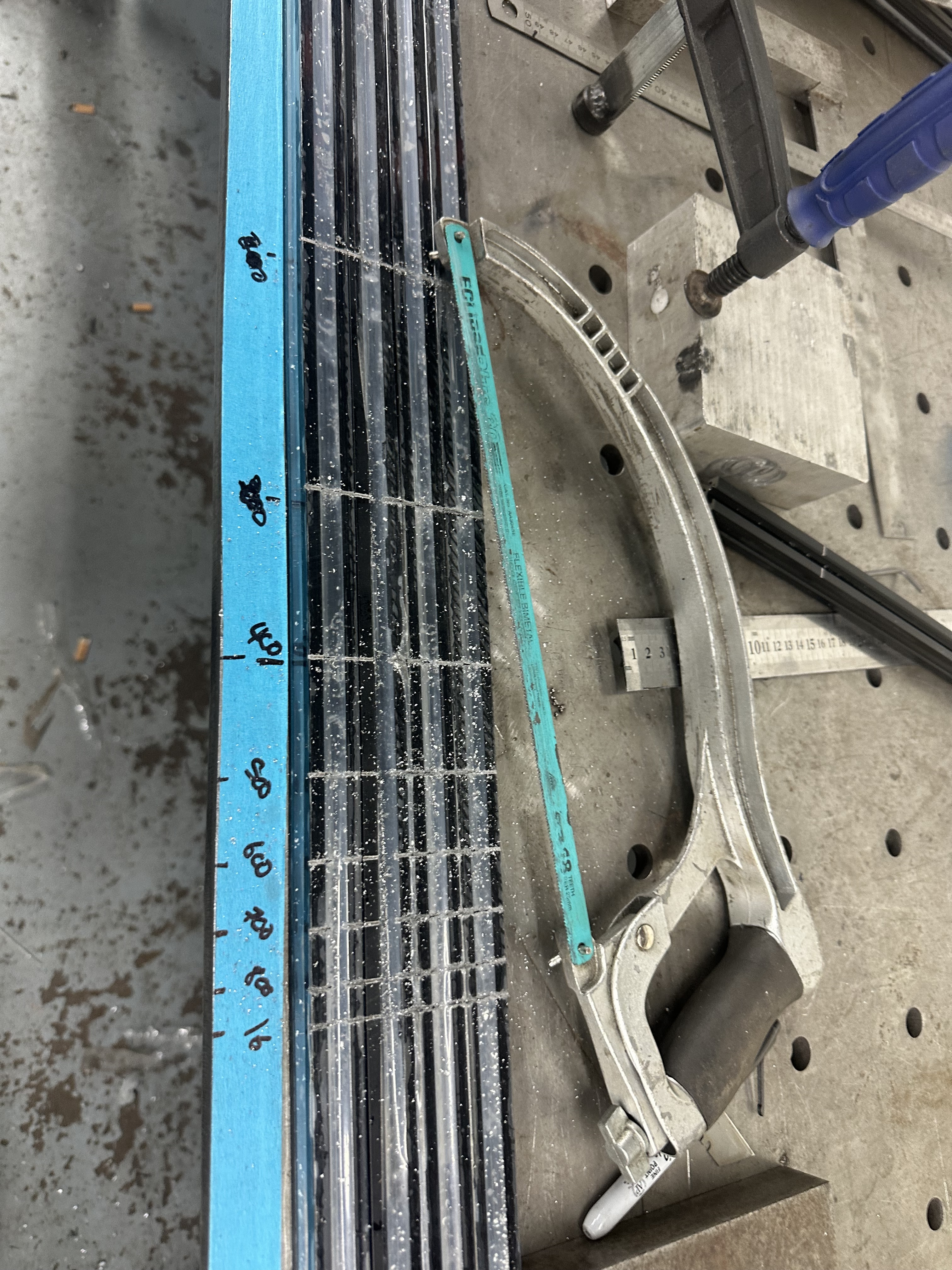
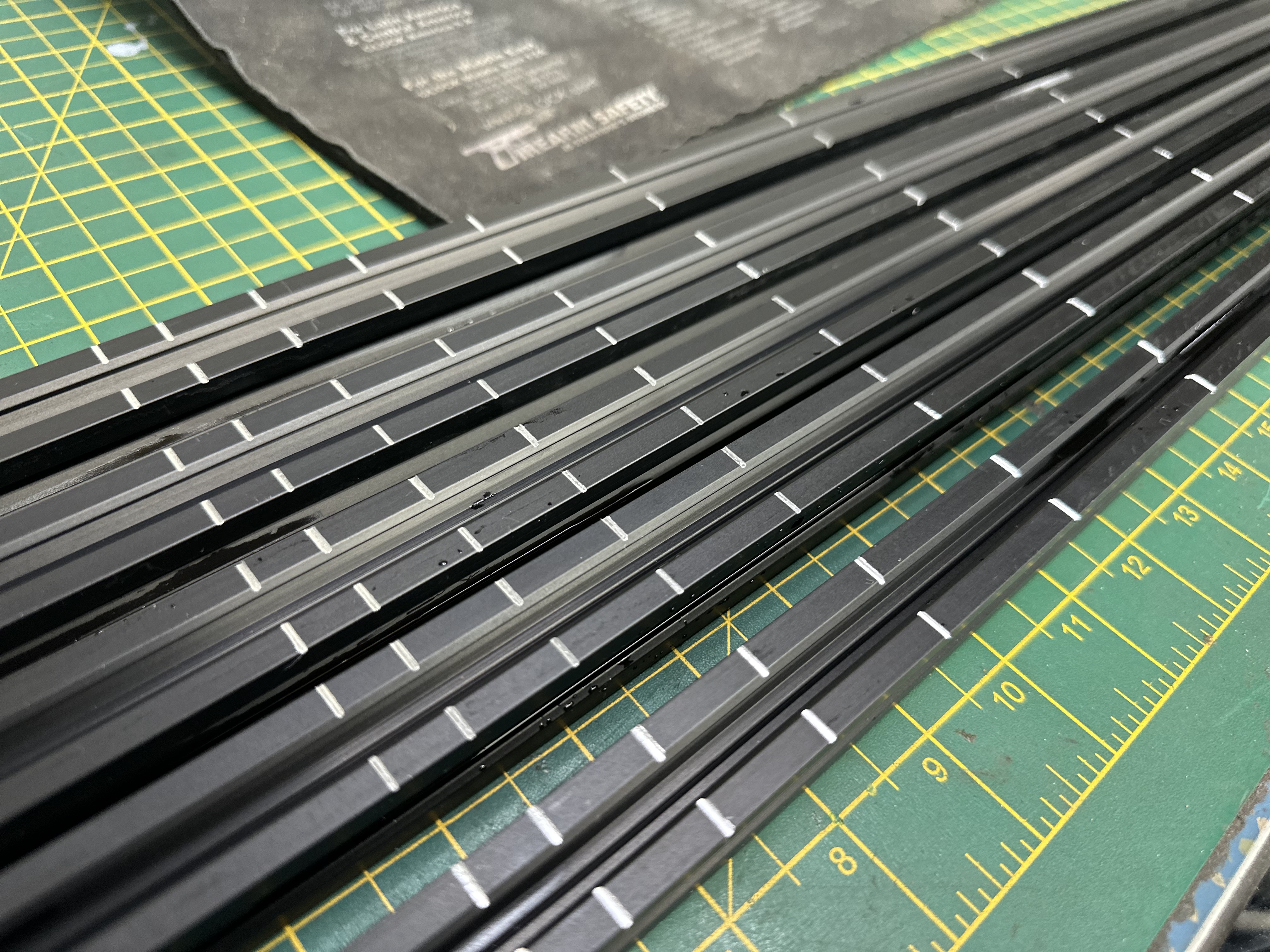
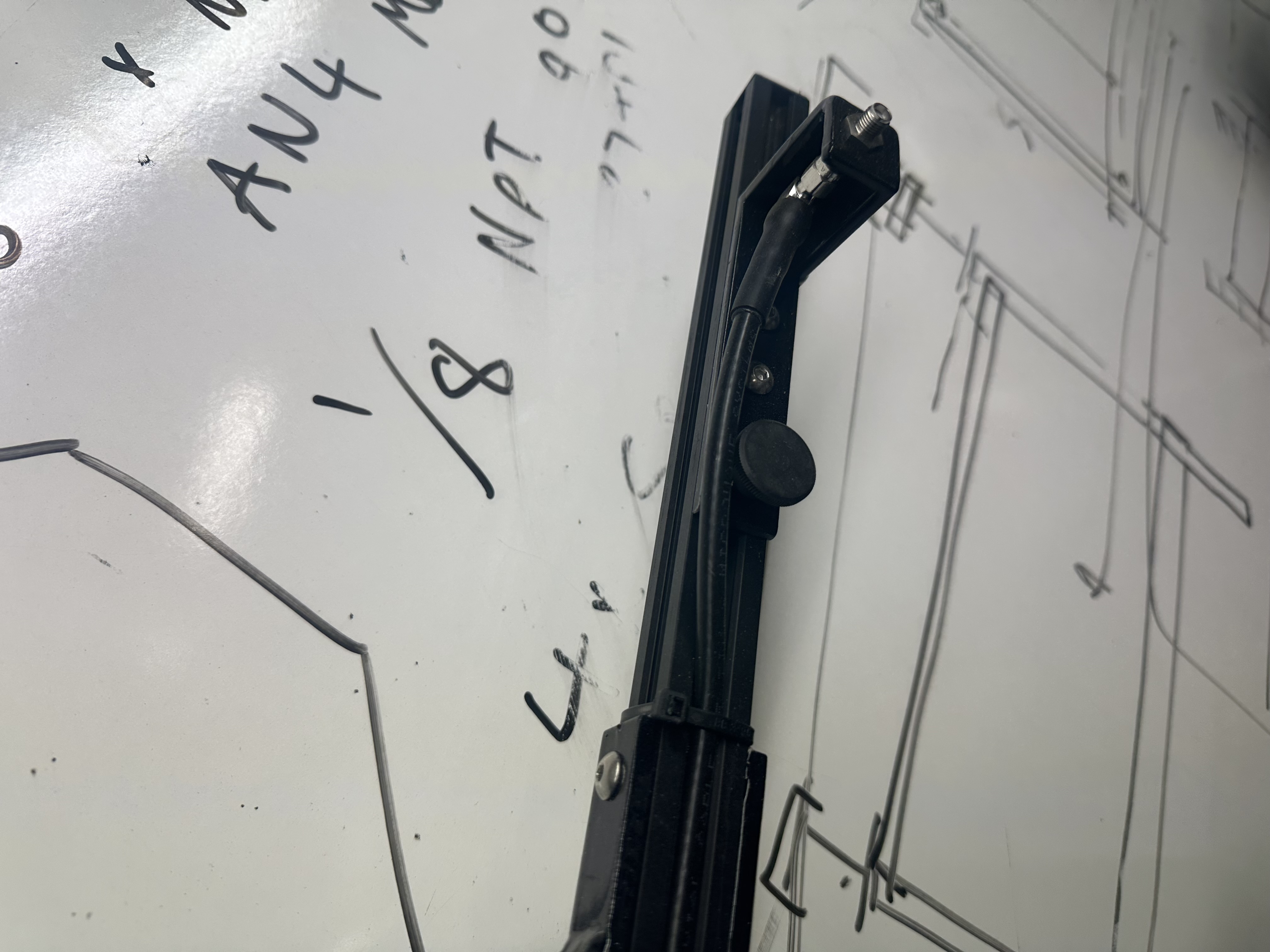
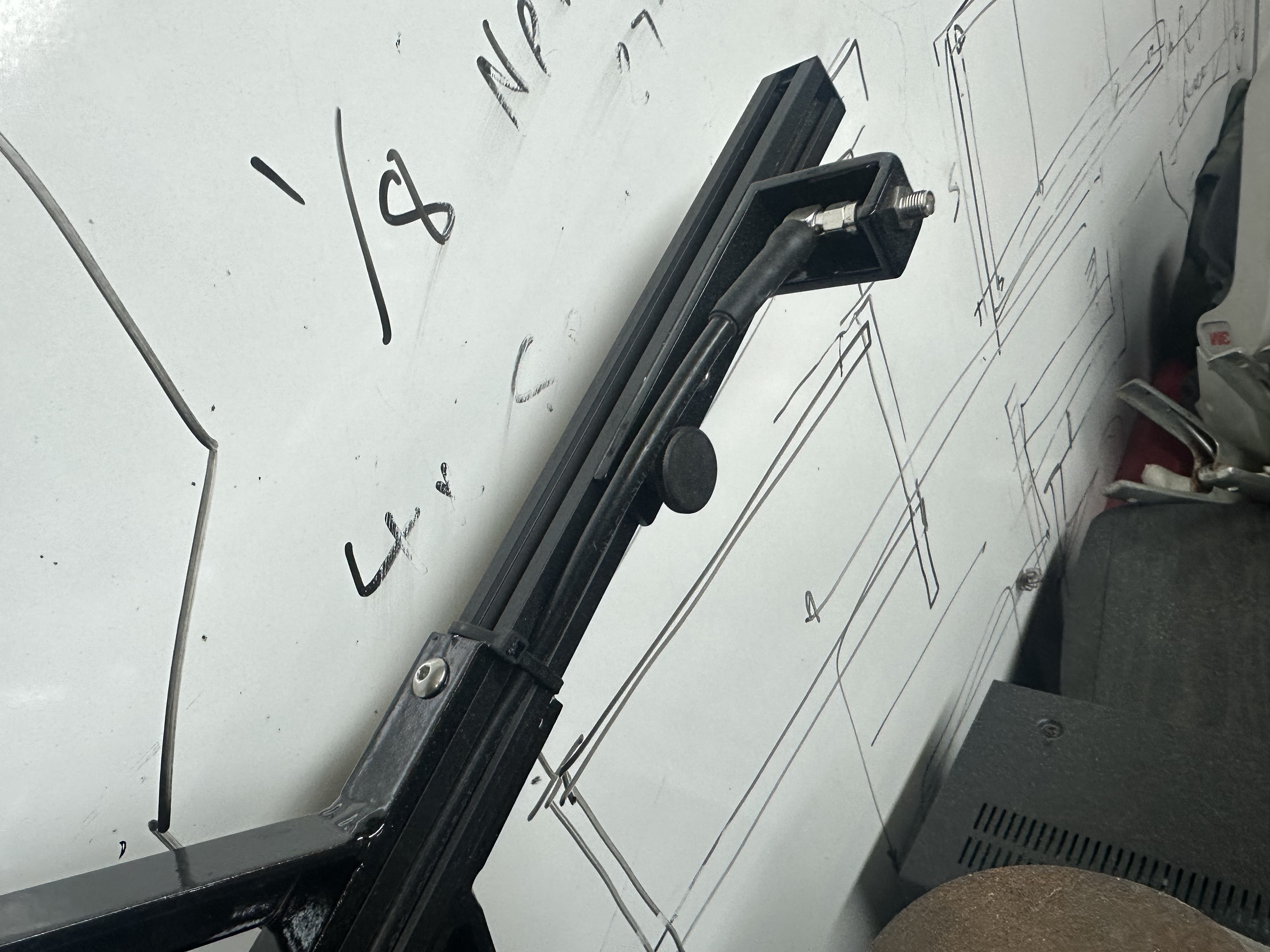
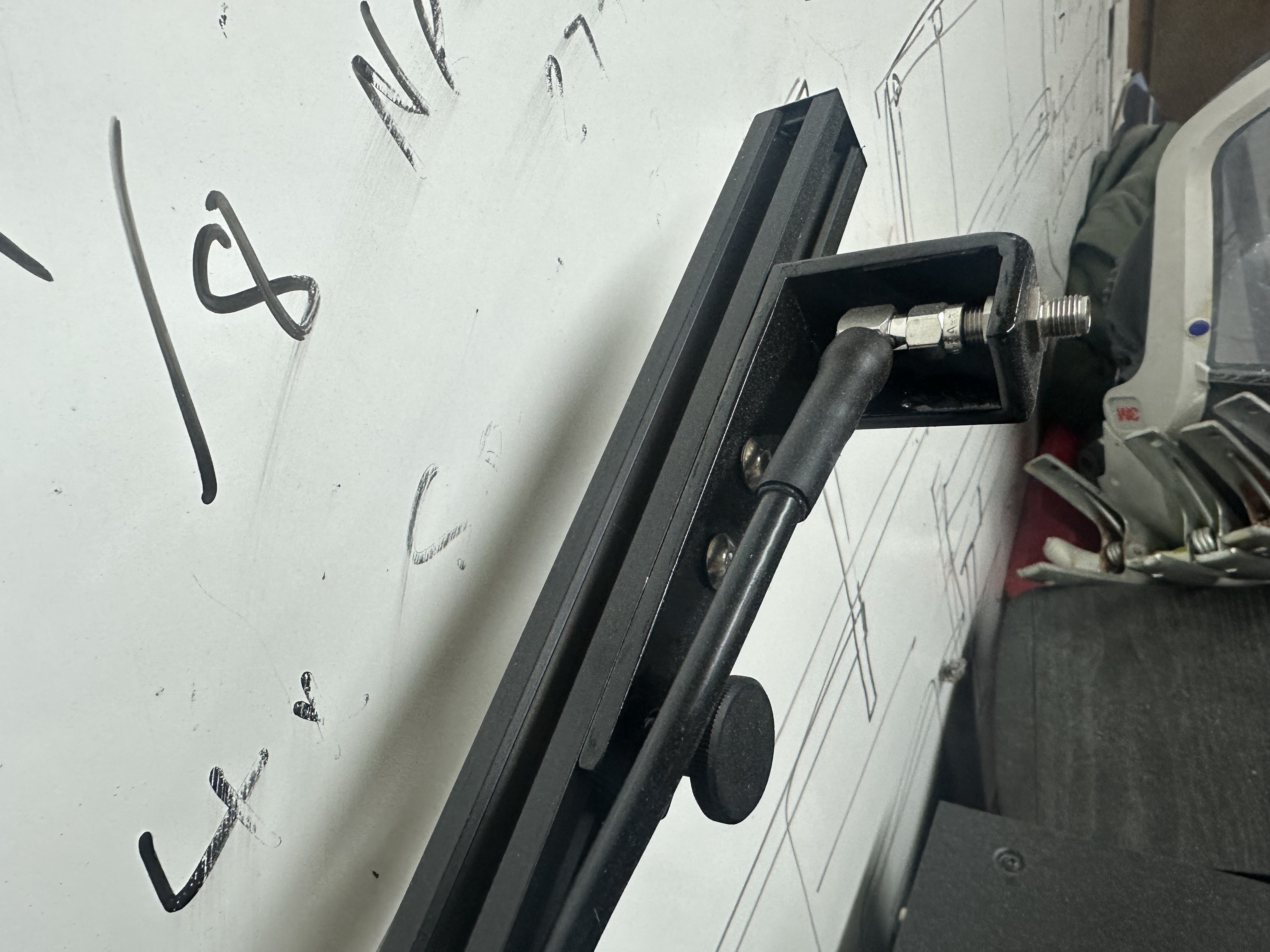
That said, if I had the tools/time I probably would have done something like this. I like that you can adjust the antenna radius arbitrarily where I have fixed holes. And you end up in SMA females where I had to deal with threaded studs. I built Nitinol antennas in addition to the antennas that came with the antenna kits I used.